ဂဟေစက်ရုပ်စီးရီး


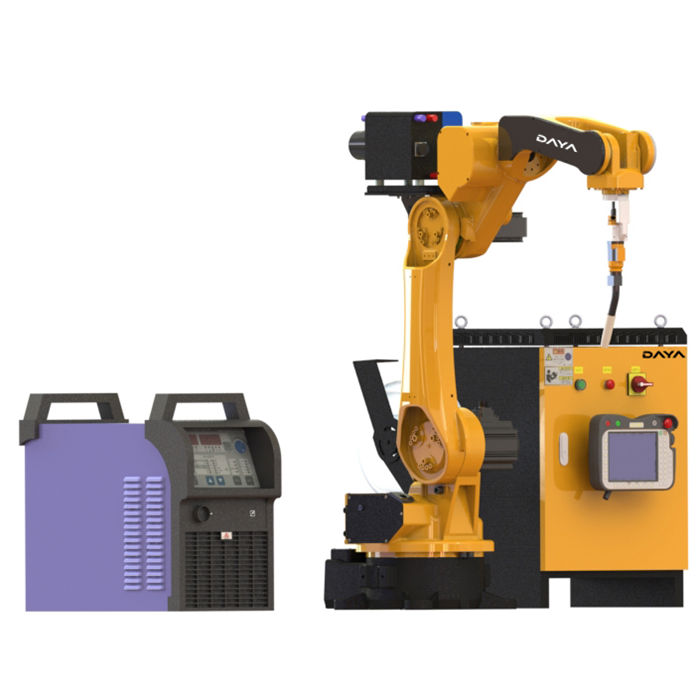

ဂဟေစက်ရုပ်

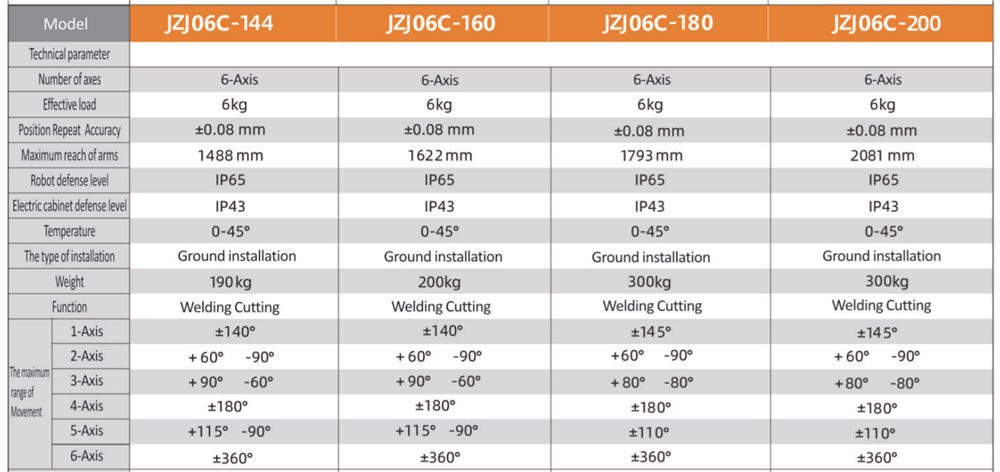
ဂဟေဆော်စက်ရုပ်စီးရီး JZJ06C-180
ဂဟေဆော်စက်ရုပ်စီးရီး JZJ06C-144

ဂဟေဆော်စက်ရုပ်စီးရီး JZJ06C-160

ဂဟေဆော်စက်ရုပ်စီးရီး JZJ06C-200
အတိုချုပ်နိဒါန်း
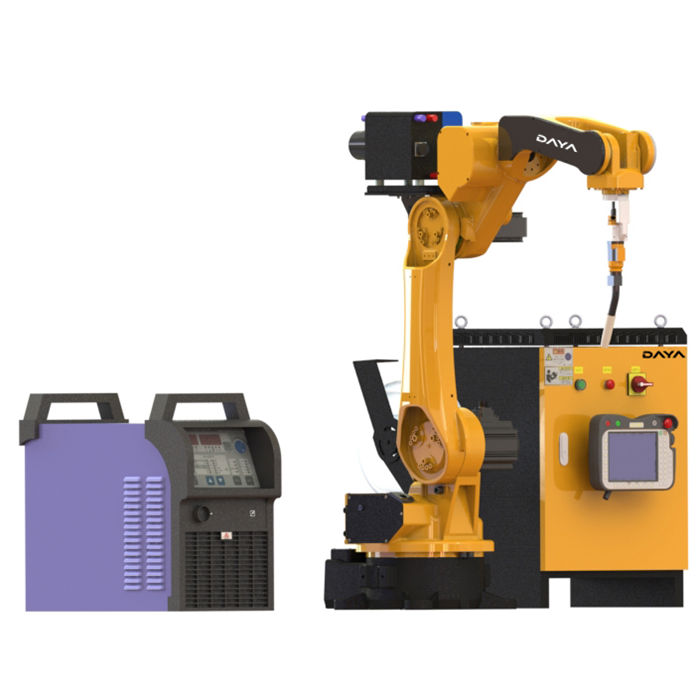
Welding robot ဆိုသည်မှာဂဟေဆော်ခြင်း (ဖြတ်တောက်ခြင်းနှင့်ပက်ဖြန်းခြင်းအပါအ ၀ င်) စက်မှုလုပ်ငန်းသုံးစက်ရုပ်ဖြစ်သည်။ စက်မှုဆိုင်ရာစက်ရုပ်သည်စံဂဟေဆော်သည့်စက်ရုပ်နှင့်သက်ဆိုင်ကြောင်းအပြည်ပြည်ဆိုင်ရာစံချိန်စံညွှန်းဆိုင်ရာအဖွဲ့အစည်း (ISO) ၏အဓိပ္ပာယ်ဖွင့်ဆိုချက်အရစက်မှုဇုန်စက်ရုပ်သည်စက်မှုလုပ်ငန်းအလိုအလျောက်နယ်ပယ်တွင်အသုံးပြုသောပရိုဂရမ်းမင်းပုဆိန်သုံးခုသို့မဟုတ်ထိုထက်ပိုသောပရိုဂရမ်မာအမျိုးမျိုးကိုအသုံးပြုသည်။ ကွဲပြားခြားနားသော applications များလိုက်လျောညီထွေဖြစ်အောင်အလို့ငှာစက်ရုပ်၏နောက်ဆုံးဝင်ရိုး၏စက်မှုမျက်နှာပြင်သည်များသောအားဖြင့်မတူကွဲပြားသောကိရိယာများသို့မဟုတ်အဆုံး effectors များနှင့်ချိတ်ဆက်နိုင်သောချိတ်ဆက်ထားသောအနားကွပ်တစ်ခုဖြစ်သည်။ ဂဟေဆော်စက်ရုပ်သည်ဂဟေဆော်ခြင်း (သို့) စက်ယန္တရားစက်ရုပ်၏နောက်ဆုံးအ ၀ န်းအနားတွင်ဂဟေဆော်ခြင်းသို့မဟုတ်ဂဟေဆော်ခြင်း (ဖြတ်တောက်ခြင်း) သေနတ်များတပ်ဆင်ရန်ဖြစ်သည်။
စက်ရုပ်ဂဟေဆော်ခြင်းသည်ဂဟေဆော်ခြင်းနှင့်အစိတ်အပိုင်းကိုကိုင်တွယ်ခြင်းနှစ်မျိုးလုံးအားဖြင့်ဂဟေဆော်မှုလုပ်ငန်းစဉ်အားလုံး ၀ အလိုအလျောက်ဖြစ်စေသည့်စက်ယန္တရားပြုထားသောပရိုဂရမ်မာကိရိယာများ (စက်ရုပ်များ) ကိုအသုံးပြုခြင်းဖြစ်သည်။ မကြာခဏအလိုအလျောက်အလိုအလျောက်ဖြစ်သည့်သဘာဝဓာတ်ငွေ့သတ္တုဒြပ်စင်ဂဟေဆော်ခြင်းကဲ့သို့သောလုပ်ငန်းစဉ်များသည်စက်ရုပ်ဂဟေဆော်ခြင်းနှင့်မကိုက်ညီပါ၊ အကြောင်းမှာလူ့အော်ပရေတာသည်တစ်ခါတစ်ရံတွင်ဂဟေဆော်ရန်ပစ္စည်းများပြင်ဆင်ရသည်။ စက်ရုပ်စက်မှုလုပ်ငန်းများကဲ့သို့သောမြင့်မားသောထုတ်လုပ်မှုလုပ်ငန်းများတွင်စက်ရုပ်ဂဟေဆော်ခြင်းအားအစက်အပြောက်ဂဟေဆော်ခြင်းနှင့် arc ဂဟေဆော်ရာတွင်အသုံးပြုသည်။
စက်ရုပ်အားဂဟေဆော်ရာတွင်စက်ရုပ်ကိုအသုံးချခြင်းသည်အသစ်စက်စက်ဖြစ်သည်။ စက်ရုပ်ကို ၁၉၆၀ ပြည့်နှစ်များအတွင်းအမေရိကန်စက်မှုလုပ်ငန်းသို့ပထမဆုံးအကြိမ်စတင်မိတ်ဆက်ခဲ့သည်။ ဂဟေဆော်ရာတွင်စက်ရုပ်များအသုံးပြုမှုသည် ၁၉၈၀ ပြည့်နှစ်များအထိမော်တော်ယာဉ်လုပ်ငန်းနယ်ပယ်သည်စက်ရုပ်များကိုအစက်အပြောက်ဂဟေဆော်ရန်စတင်အသုံးချသည့်အချိန်မှစတင်ခဲ့သည်။ ထိုအချိန်မှစ၍ စက်မှုလုပ်ငန်းများတွင်အသုံးပြုသောစက်ရုပ်အရေအတွက်နှင့်သူတို့၏အသုံးချမှုအရေအတွက်များပြားလာသည်။ ၂၀၀၅ ခုနှစ်တွင်မြောက်အမေရိကစက်မှုလုပ်ငန်းတွင်စက်ရုပ်ပေါင်း ၁၂၀,၀၀၀ ကျော်ကိုအသုံးပြုခဲ့ပြီး၎င်းတို့အနက်ထက်ဝက်ခန့်မှာဂဟေဆော်ရန်ဖြစ်သည်။ ကြီးထွားမှုသည်အဓိကအားဖြင့်မြင့်မားသောပစ္စည်းကိရိယာကုန်ကျစရိတ်နှင့်ကန့်သတ်ချက်ရှိသောထုတ်လုပ်မှုဆိုင်ရာအသုံးချခြင်းများကြောင့်ဖြစ်သည်။
Robot arc welding သည်မကြာသေးမီကမှအလျင်အမြန်ကြီးထွားလာခဲ့ပြီးစက်မှုစက်ရုပ်အသုံးချမှု၏ ၂၀% ခန့်ကိုအမိန့်ပေးပြီးဖြစ်သည်။ arc welding robots ၏အဓိကအစိတ်အပိုင်းများမှာစက်ရုပ်၏ "ဦး နှောက်" ဖြစ်သည့် manipulator (သို့) စက်မှုယူနစ်နှင့် controller ဖြစ်သည်။ ခြယ်လှယ်သူသည်စက်ရုပ်ကိုလှုံ့ဆော်ပေးသည့်အရာဖြစ်ပြီးထိုစနစ်များ၏ဒီဇိုင်းကိုစက်၏လက်မောင်းများကိုညွှန်ကြားရန်ကွဲပြားခြားနားသောကိုသြဒီနိတ်စနစ်များကိုအသုံးပြုသော SCARA နှင့် Cartesian coordinate robot ကဲ့သို့အမျိုးအစားများစွာခွဲခြားနိုင်သည်။
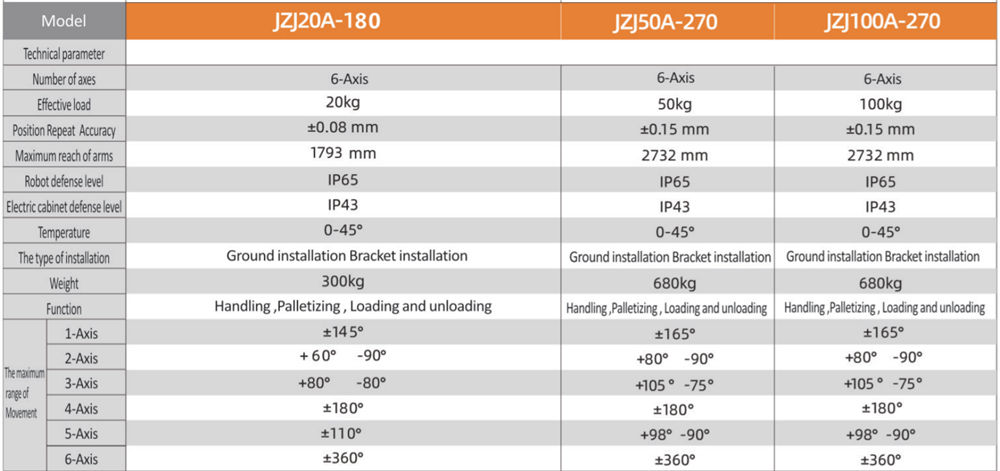
ဂဟေစက်ရုပ်စီးရီးနည်းပညာပိုင်းဆိုင်ရာ Parameters